| Start | Spezial | Hardware | Software | Download | Links |
| Anwenderseiten und technische Informationen zum |
|
C-Control Experimentieradapter Software und Beispielanwendungen
|
||||||||||||||||||
|
Der C-Control- Steuercomputer ist ein preiswertes und leistungsfähiges System, das vor allem im Hobbybereich und in der Industrie eingesetzt wird. Die Programmierung erfolgt mit einem Basic-Compiler unter DOS oder Windows95. Alternativ kann auch die graphische Programmieroberfläche CC/Plus eingesetzt werden. Die kompilierten Programme werden in einem EEPROM auf der Platine gespeichert, so dass sie autonom eingesetzt werden. Besonders die einfache Programmierung macht C-Control zu einem interessanten System vor allem in berufsbildenden Schulen. Damit einfache Experimente auch ohne Lötarbeiten durchgeführt werden können, wurde von der Firma Modul-Bus das „Experimentier-Board“ für den C-Control-Steuercomputer entwickelt. Die Control-Unit kann hier als Prozessor-Einheit aufgesetzt werden. Leistungstreiber und Schutzschaltungen auf dem Board sorgen für ein einfaches und gefahrloses Arbeiten. Dazu tragen insbesondere die Schraubklemmen für alle Ein- und Ausgänge bei. Das Experimentierbord verfügt über einen Spannungsregler und einen verpolungssicheren Hohlstecker-Anschluss für einfache Steckernetzteile mit 9 V ... 14 V. Alle Anschlüsse liegen an Schraubklemmen und an einem 25-poligen Sub-D-Stecker zum Anschluss von Funktionsmodellen. Die Anschlussbelegung und die elektrischen Daten entsprechen dem SIOS-Interface. An acht digitale Leistungsausgänge können direkt Verbraucher bis 600 mA angeschlossen werden. Die Gesamtlast darf ca. 2 A nicht überschreiten. Alle Ausgänge sind jedoch kurzschlussfest und überlastsicher. Alle Ausgangszustände werden an zusätzlichen LEDs angezeigt, so dass sich Aktionen eines Programms leicht überblicken lassen. Auch für die analogen Ausgänge befinden sich Leistungsverstärker auf dem Board. Sie können bis 300 mA pro Kanal belastet werden und sind gegen Überlastung geschützt. Das Board verfügt zusätzlich über acht geschützte digitale Eingänge mit TTL-Pegeln. Alle Eingangszustände werden laufend unabhängig vom Zustand der Control-Unit an zusätzlichen LEDs angezeigt. Zwei der acht vorhandenen analogen Eingänge der Control-Unit werden an die Anschlussklemmen gelegt und gegen Überspannungen gesichert. Der Messbereich beträgt hier 5 V. Zwei weitere Analogeingänge werden mit einem Messbereich von 2,5 V betrieben und liegen an speziellen Sensorbuchsen, die auch eine Stromversorgung bieten. Zahlreiche interessante Sensoren wie z.B. für Temperaturen, Magnetfelder oder pH-Wert können hier direkt angesprochen werden. Für spätere Erweiterungen wird auch der interne I²C-Bus der Control-Unit an die Sensorbuchsen geführt. Anwendungen liegen z.B. in Kalibriertabellen, die in EEPROMs mit auf dem Sensor integriert werden. Aber auch Steuerungen über den I²C-Bus sind möglich. |
||||||||||||||||||
Technische DatenDie technischen Daten des Experimentieradapters sollen hier in einer Übersicht zusammengestellt werden:
|
||||||||||||||||||
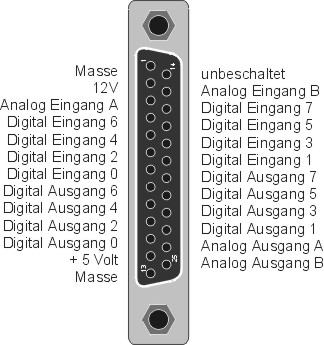
Anschlüsse
Anschlussbelegung der Schraubklemmen von links nach rechts:
A
8 Digitale Eingänge, TTL-Pegel, unbeschaltet low
(Byteport 2) Hinweis: Die Ausgangsspannung an den digitalen Leistungsausgängen ist von der verwendeten Stromversorgung abhängig und liegt um ca. 1 V bis 2 V unter der Versorgungsspannung. Die Spannung der digitalen Ausgänge kann daher in gewissen Grenzen an bestimmte Verbraucher angepasst werden.
1
Referenzspannung 2,5V
Übersicht über die Verwendung der Prozessorports: Byteport 1:
Digitale Ausgänge Achtung: Byteport 2 darf von der Software nicht als Ausgang initialisiert werden. Hinweise:
1. Die serielle Schnittstelle ist über das
Anschlusskabel der C-Control-Unit anzuschließen. Mit dem Experimentierbord ergeben sich folgende Arbeitsmöglichkeiten:
Auch größere Funktionsmodelle wie Rob 1 oder Styroplot können direkt am Sammelstecker angeschlossen werden. Sie lassen sich z.B. autonom mit CC-BASIC steuern, um den industriellen Einsatz von Prozessrechnern nachzubilden. Neben CC-BASIC und CC/Plus können auch speziell angepasste Versionen von Do-It und ModulLAB verwendet werden. C-Control erhält dazu ein spezielles, in Assembler geschriebenes Treiberprogramm, das alle wesentlichen Funktionen des SIOS-Interface implementiert. Versuche lassen sich nun zunächst online z.B. mit Do-It durchführen, um dann ein optimiertes autonomes Programm zu entwickeln. |
||||||||||||||||||
Software und BeispielanwendungenDie C-Control-Unit lässt sich wie gewohnt mit CC-BASIC programmieren. Bei der Verwendung von Digitalports muss beachtet werden, dass nur der Byteport 1 als Ausgang definiert werden darf. '************************************** '
--- Programmoperationen ------------- Ansteuerung einer LED-Matrix in CC/BASIC Mit der graphischen Programmieroberfläche C-Control-Plus lassen sich auf einfache Weise Steuerprogramme erstellen. Die Ports 1 bis 8 stellen Ausgänge dar, die Ports 9 bis 16 sind die Eingänge des Experimentierbords.
Programmierung mit CC/Plus Das Anwenderprogramm Do-It
(DOITCC) eignet sich für einfache Experimente,
wobei alle Ein und Ausgänge des Systems direkt zugänglich
sind. Eingangsdaten lassen sich graphisch aufzeichnen
und über lange Zeiträume beobachten. Außerdem
steht eine vereinfachte Programmierumgebung zur Verfügung.
Do-It für C-Control |
||||||||||||||||||
|
|
| Start | Spezial | Hardware | Software | Download | Links |
AK MODUL-BUS Computer GmbH, Münsterstr. 45, 48477 Hörstel-Riesenbeck, Tel. +49-54 54 / 9 34 36 36 Fax +49-54 54 / 9 34 36 37
Mail: info@ak-modul-bus.de