| Start | Spezial | Hardware | Software | Download | Links |
| Anwenderseiten und technische Informationen |
|
SERAI 812 Download: serai8.zip (447K) enthält Windows-Programme und diese Beschreibung Allgemeine Beschreibung  Technische Daten Programmbeispiel GW-Basic Programmbeispiel Turbo Pascal Programmbeispiel VBA Technische Beschreibung des Wandlers
|
||||||||||||
|
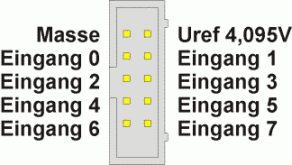
Allgemeine Beschreibung Das SERAI812 ist ein Analoginterface zum direkten Anschluss an die serielle Schnittstelle des PC. Die Stromversorgung erfolgt über die Schnittstelle. Das Interface verwendet den AD-Wandler MAX186 mit seriell getakteter Datenübertragung. Die Datenübertragung zum und vom Wandler erfolgt durch direkte Steuerung der Handshakeleitungen der seriellen Schnittstelle. Die Stromversorgung wird durch die hochgesetzte TXD-Leitung gespeist. Alle Eingänge sind durch Vorwiderstände gegen Überspannungen geschützt. Die Eingänge liegen an Schraubklemmen und zusätzlich an einem 10-poligen Pfostenstecker, der auch die interne Referenzspannung von 4,095V zur Verfügung stellt. Die Programmierung kann in einer beliebigen Programmiersprache erfolgen. Beispiele für BASIC, PASCAL und Excel-VBA liegen bei. |
||||||||||||
|
Technische Daten
|
||||||||||||
|
||||||||||||
|
Program
MAX186; |
||||||||||||
|
Programmbeispiel VBA Das folgende
Listing zeigt ein Excel-Makro unter Verwendung der
RSAPI.DLL zur direkten Steuerung der seriellen
Schnittstelle in Excel. Die serielle
Datenübertragung zwischen PC und Wandler erfolgt
mit der Funktion Shift8. Während beim
Übertragen des Steuerbytes der Rückgabewert der
Funktion nicht ausgewertet wird, werden zum
Auslesen der gewandelten Daten Nullbytes an Shift8
übergeben. Das Beispiel ist aus [1] entnommen und
verwendet eine andere Zuordnung der Eingänge. Die
RSAPI.DLL liegt dem Buch bei.
Declare Sub OPENCOM
Lib "RSAPI.DLL" (ByVal Parameter$) |
||||||||||||
|
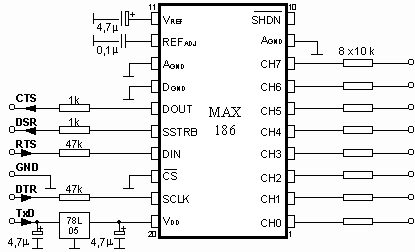
Technische Beschreibung des Wandlers Der verwendete Baustein MAX186 ist ein CMOS-Wandler mit acht Eingangskanälen bei einer Auflösung von 12 Bit. Er enthält eine interne Spannungsreferenz mit 4,096V und benötigt nur ca. 1,5mA an 5V. In ca. 7µs wird eine sukzessive Approximation mit zwölf Schritten durchgeführt, so daß Wandlungsraten bis über 100 kHz erreicht werden können. Die folgende Tabelle zeigt die Anschlüsse des IC's: Pin Bezeichnung Funktion Das Schaltbild zeigt den Anschluss des Wandlers an die serielle Schnittstelle. Der PC stellt an DTR Taktimpulse bereit, mit denen über RTS Daten seriell in den Wandler getaktet werden. Serielle Daten des ICs werden über CTS eingelesen. Der Eingang DSR der Schnittstelle liest den Statusausgang SSTRB des Wandlers, um das Ende einer Wandlung erkennen zu können, was allerdings in der Software meist nicht nötig ist, weil die Datenübertragung ausreichend langsam ist. Die erhöhte Ausgangsspannung von ± 12V wird über hochohmige Widerstände in Zusammenarbeit mit den internen Schutzdioden des MAX186 begrenzt. Die Stromversorgung erfolgt über die hochgesetzte TXD-Leitung (BREAK-Zustand).
Die Beschriftung der Eingänge auf der Platine ist gegenüber der Kanal-Bezeichnung des MAX186 invertiert, d.h. CH7 der Anschlussklemme entspricht CH0 am MAX186. Dadurch entspricht das Layout der üblichen Anordnung von Binärzahlen. Die Umkehrung ist bei der Erstellung von Software zu beachten. Der Wandler kennt zahlreiche Betriebsarten, die beim Start einer Wandlung über das seriell übertragene Steuerbyte festgelegt werden. Die Wandlung kann mit internem oder externem Takt erfolgen. Wählt man den externen Takt, dann erfolgt die eigentliche Wandlung mit ihrer sukzessiven Approximation synchron zum Auslesevorgang. Dabei muss eine symmetrische Rechteckform eingehalten werden, und es darf eine Taktrate von 100 kHz nicht unterschritten werden, weil es sonst durch Entladung des internen Abtast-Halteglieds zu einer Verschlechterung der Messgenauigkeit kommen kann. Weil eine ausreichend hohe Taktfrequenz bei der direkten Programmierung der Portleitungen nicht sichergestellt werden kann, wird hier nur mit internem Takt gearbeitet. Die Taktimpulse des PC dienen nur zur Datenübertragung und dürfen im Bereich Null bis 10 MHz liegen. Die Betriebsarten werden über zwei Bits des Steuerbytes eingestellt. Es stehen zwei Power-down-Modi zur Verfügung, die nur bei batteriebetriebenen Geräten von Bedeutung sind. Die totale Abschaltung aller internen Schaltungsteile führt zu einer Reduzierung des Versorgungsstroms auf 2µA. Nach dem erneuten Aktivieren ist jedoch eine Wartezeit von 50 ms einzuhalten. Eine schnellere Variante schaltet die interne Referenz nicht ab und führt zu einer Stromreduzierung auf 30µA. Über die Power-Down-Bits PD1 und PD0 wird außerdem zwischen internem oder externem Takt während der Umsetzung umgeschaltet. Weitere Steuerbits wählen die Art der Messung aus. Außer den üblichen massebezogenen Eingängen können Differenzeingänge gewählt werden, wobei immer zwei Eingänge zusammenarbeiten. Neben der unipolaren Messung (0...4,095V) ist für Differenzeingänge auch eine bipolare Betriebsart (-2,047V ... +2,047V, bezogen auf den negativen Eingang) möglich. Die aktiven Eingangskanäle werden über drei Bits (SEL0...SEL2) gewählt. Die Übertragung des Steuerworts beginnt immer mit dem als Startbit gesetzten MSB. Die folgende Tabelle zeigt den Aufbau des Steuerbytes: Bit Name Funktion 7 START immer gesetzt Die Steuerbits SEL0 bis SEL2 wählen den aktiven Eingangskanal aus. Ihre drei Bits stellen einen Zahlenwert im Bereich 0 bis 7 dar. Es stehen entweder vier Differenzeingänge oder acht massebezogene Eingänge zur Verfügung. Bipolare Messungen sind nur für Differenzeingänge möglich, weil die Eingangsspannungen nur im Bereich 0 bis 5V liegen können. Wählt man Differenzeingänge, dann muss der negative Eingang während der gesamten Umsetzzeit eine stabile Spannung aufweisen, während der positive Eingang nur kurz abgetastet wird und schnelle Änderungen verträgt. SEL0...2 Differenzeingänge Einzeleingang 0 CH0 gegen CH1 CH0 Nach der Übertragung des Steuerbytes beginnt die eigentliche Umsetzung mit einer Dauer von maximal 10µs. Dann können zwei Bytes ausgelesen werden. Das zuerst gelesene Highbyte enthält die acht höchstwertigen Bits. Das Lowbyte enthält Nullen in den vier niederwertigen Bits und vier Datenbits in den Bits 4 bis 7. Literatur: |
||||||||||||
|
|
| Start | Spezial | Hardware | Software | Download | Links |
AK MODUL-BUS Computer GmbH, Münsterstr. 45, 48477 Hörstel-Riesenbeck, Tel. +49-54 54 / 9 34 36 36 Fax +49-54 54 / 9 34 36 37
Mail: info@ak-modul-bus.de